CARLAのための模倣学習トレーニング
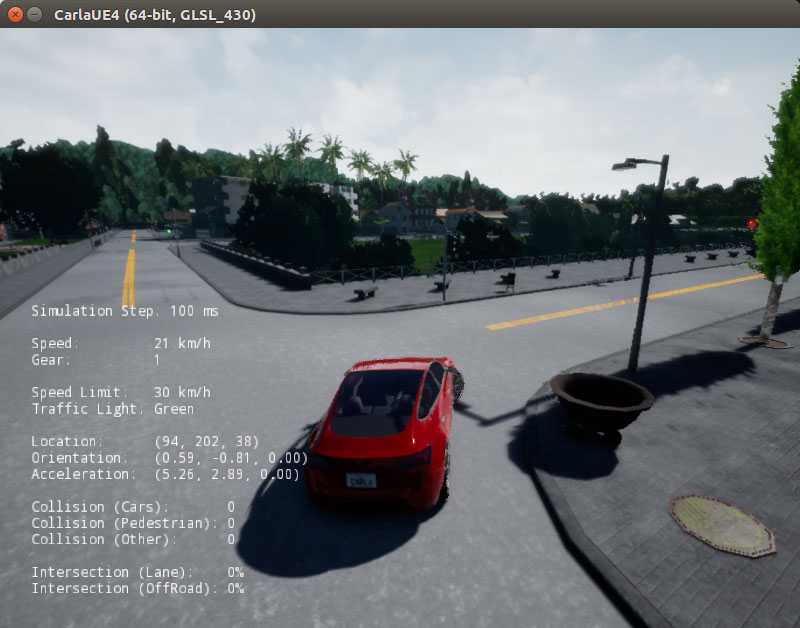
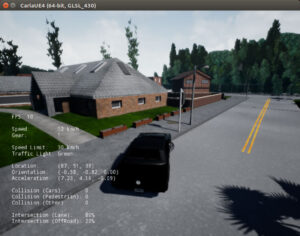
CARLAは、自動運転研究のためのオープンソースシミュレーターです。
この記事では、CARLAのための模倣学習トレーニングについて紹介します。
CARLAにおける自動運転のための模倣学習
以下のリポジトリに、CARLAにおいてドライビングベンチマーク(CoRL-2017ベンチマーク)を実行するためのコードとトレーニング済モデルがあります。
https://github.com/carla-simulator/imitation-learning
このリポジトリからデータセット(24GB)へのリンクがありますが、トレーニング用のコードは含まれていません。
ここでは、以下のリポジトリと上記データセットを組み合わせて、模倣学習のトレーニング環境を構築します。
https://github.com/mvpcom/carlaILTrainer
模倣学習のトレーニング環境の構築
前提条件
- Ubuntu 16.04以降
- Docker
- NVIDIA Docker 2
- NVIDIA Driver >= 390
carlaILTrainerリポジトリのclone
以下のコマンドで、carlaILTrainerリポジトリをcloneします。
$ cd $ git clone https://github.com/mvpcom/carlaILTrainer
データセットの準備
ここ(https://github.com/carla-simulator/imitation-learning#dataset)からリンクされているデータセット(24GB)をダウンロードし、以下のコマンドで展開します。
$ cd ~/carlaILTrainer $ tar xf ~/Downloads/CORL2017ImitationLearningData.tar.gz
なお、エラーが発生するdata_06790.h5は、除外しておきます。
Dockerイメージの作成
carlaILTrainerリポジトリのperfectEnv.ymlを用いて、Dockerイメージを作成します。
Dockerfileの詳細は省略しますが、tensorflow-gpu 1.4.1を動作させるため、nvidia/cuda:8.0-cudnn6-runtime-ubuntu16.04をベースにします。
また、minicondaのインストール後に、以下のコマンドを実行するようにします。
# Dockerfile /path/to/conda env create -f perfectEnv.yml
以下のコマンドで、Dockerイメージを作成します。
$ docker build -t carla_ilt .
CARLAのための模倣学習トレーニング
Dockerコンテナの起動
以下のコマンドで、Dockerコンテナを起動します。
$ docker run --runtime=nvidia --rm -it -v /home/$USER/carlaILTrainer:/workspace carla_ilt
模倣学習のトレーニング
以下のコマンドで、模倣学習のトレーニングを実行します。
# source activate carlaSimPy2 # python train.py
testディレクトリにトレーニング済モデルが保存されます。
トレーニング済モデルをimitation-learningディレクトリに移動したのち、python run_CIL.pyを実行してみましたが、ここ(https://github.com/mvpcom/carlaILTrainer/issues/6)に書かれているように、エラーが発生します。
まとめ
この記事では、CARLAのための模倣学習トレーニングについて紹介しました。