Vehicle Detection using Darknet YOLOv3 on Jetson Nano
前回の記事においてJetson Nano上に構築したDarknetのYOLOv3とTiny YOLOv3の環境を用いて、Vehicle Detectionを行いました。
COCOデータセットにおけるYOLOv3とTiny YOLOv3のパフォーマンス
COCOデータセットにおけるYOLOv3等のパフォーマンスが、YOLO: Real-Time Object Detectionに示されています。
以下の表は、上記のサイトからYOLOv3 (YOLOv3-416)とTiny YOLOv3 (YOLOv3-tiny)のパフォーマンスを抜き出したものです。
| Model | Train | Test | mAP | FLOPS |
|---|---|---|---|---|
| YOLOv3-416 | COCO trainval | test-dev | 55.3 | 65.86 Bn |
| YOLOv3-tiny | COCO trainval | test-dev | 33.1 | 5.56 Bn |
YOLOv3-416とYOLOv3-tinyのmAPは、それぞれ55.3と33.1です。両者のmAPには、22.2の差があります。
DarknetのYOLOv3とTiny YOLOv3を用いたVehicle Detection
Jetson Nano上に構築したDarknetのYOLOv3とTiny YOLOv3の環境を用いて、GitHub – udacity/CarND-LaneLines-P1: Lane Finding Project for Self-Driving Car NDのテストビデオ(solidWhiteRight.mp4)のVehicle Detectionを行いました。
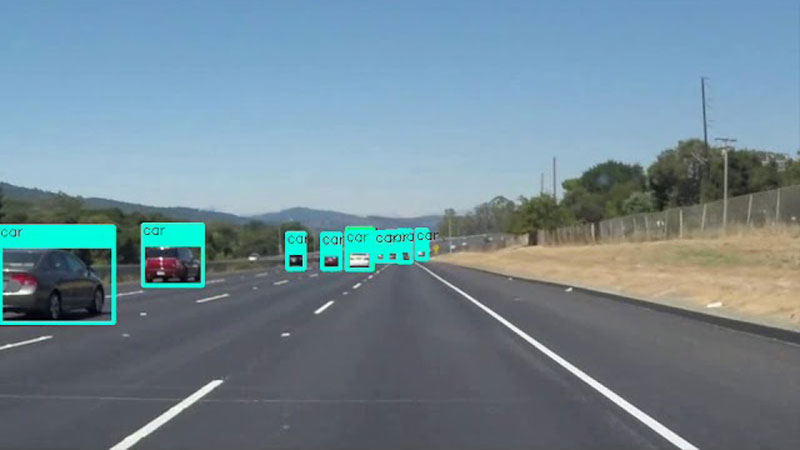
Darknet YOLOv3 (YOLOv3-416)
下のビデオは、Jetson Nano上のDarknet YOLOv3を用いてVehicle Detectionした結果を示しています。
YOLOv3は、遠方のVehicleを検出していることが分かります。
ただし、このときのFPSは約2でした。
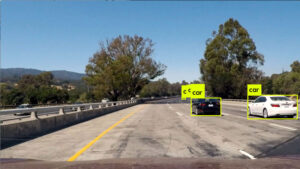
Darknet Tiny YOLOv3 (YOLOv3-tiny)
下のビデオは、Jetson Nano上のDarknet Tiny YOLOv3を用いてVehicle Detectionした結果を示しています。
このときのFPSは約16でした。
ただし、Tiny YOLOv3は、遠方のVehicle、すなわち小さな物体を検出していないことが分かります。
両者のmAPの差が、小さな物体の検出性能に表れているように見えます。
まとめ
前回の記事においてJetson Nano上に構築したDarknetのYOLOv3とTiny YOLOv3の環境を用いて、Vehicle Detectionを行いました。
Darknet YOLOv3は、遠方のVehicleを検出しているのですが、処理速度(FPS:約2)が不足しています。
Darknet Tiny YOLOv3では、処理速度(FPS:約16)は良いのですが、遠方のVehicleの検出は難しいようです。